Pytorch - 基于卷积神经网络的CIFAR-10数据集分类模型训练与检测
小白劝退预告
- 仅简单介绍思路,没有用作教程的打算,如果读者没有机器学习基础、计算机视觉基础或Pytorch基础 —— 会很不友好的(
CIFAR-10数据集介绍
CIFAR-10数据集的内容
- CIFAR10数据集共有60000个样本,每个样本都是一张32*32像素的RGB图像(彩色图像),每个RGB图像又必定分为3个通道(R通道、G通道、B通道)。这60000个样本被分成了50000个训练样本和10000个测试样本
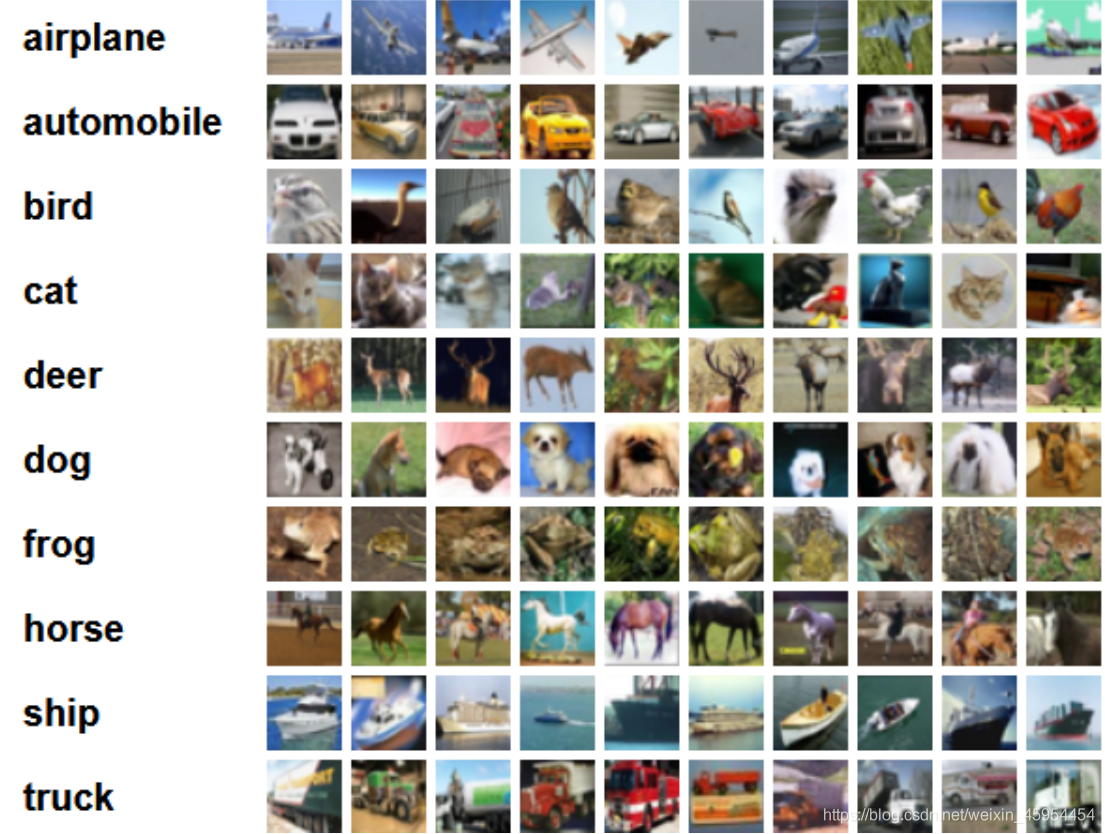
- CIFAR10数据集是用来监督学习训练的,那么每个样本就一定都配备了一个标签值(用来区分这个样本是什么),不同类别的物体用不同的标签值,CIFAR10中有10类物体,标签值分别按照0~9来区分,他们分别是飞机(airplane)、汽车(automobile)、鸟(bird)、猫(cat)、鹿(deer)、狗(dog)、青蛙(frog)、马(horse)、船(ship)和卡车(truck)
- CIFAR10数据集的内容,如图所示
总的来说,CIFAR-10数据集有以下优势:
- 图片像素小,处理快,便于入门
- 数据量大,且下载便利
- 已提前做好数据标注,提供专用API,使用便捷
- 彩色图片,RGB三通道,考验进阶思维
Pytorch实现神经网络
Pytorch 加载 CIFAR-10 数据集
首先,利用 torchvision.dataset 对象内置的 API 获取数据集; 并利用变换函数(transform 参数)对读取的图片实现 tensor 化和正则化。torchvision.transforms 对象内置了一些函数能帮我们实现这一要求,该对象内置了 Compose函数,可以便捷地为我们打包一系列的数据预处理变换 —— 比如 tensor 化和正则化
其次,利用 torch.utils.data.DataLoader 对象为 torchvision.dataset 对象套上一个加载器,可以便捷地给我们返还数据和标签
1 | from torchvision import datasets, transforms |
Pytorch 实现卷积神经网路
torch.nn.Module 对象内置了前向传播和参数设置等一系列的 API,我们自己定义一个继承自 torch.nn.Module 对象的类便于我们的后续操作
下列部分都是基本的 Pytorch 语法,不过多做解释,在这里我打算推演一遍单张图片的这个 tensor 的尺寸该如何计算:
- 图片是彩色、采用 rgb 编码的 32 * 32 像素的图片。rgb 编码意味着这张图由 r、g、b 三张特征图构成,每张特征图的尺寸都是 32 * 32,故最早的输入尺寸是 (3, 32, 32)
- 第一次卷积,从 3 张特征图生成为 6 张特征图; 同时卷积会让图片的长宽损失一定的大小,对于本次训练,长宽各损失了 2 * (5 - 1) / 2 = 4 个像素点,故经过第一层卷积后,图片数据尺寸变为 (6, 28, 28)
- 第一次池化,池化是指将图片长款压缩,对于本次训练,长宽均压缩为原来的 1/2,故此时图片数据尺寸变为 (6, 14, 14)
- 第二次卷积,原理与第一次卷积相同,最终得到数据尺寸为 (16, 10, 10)
- 第二次池化,原理与第一次池化相同,故此时图片数据尺寸变为 (16, 5, 5)
- 将多次卷积、池化后的图片数据一维化,强制变为一维张量,即此时数据尺寸为 (-1, 16 * 5 * 5)
- 将上述得到的含有 400 元素的张量多次输入到线性回归层中,最终得到 10 个数值,分别代表了 10 个分类的正确概率
- 上述的所有操作都会经过 relu() 激活函数用以非线性化,relu() 函数不会改变数据尺寸,故不考虑
1 | from torch import nn |
定义超参数
超参数就是全局变量,我们需要定义以下几个超参数:
- model: 要训练的模型,实例化上文我们定义的类即可
- epoches: 训练批数,每批训练 14000 次
- learning_rate: 学习率,控制着模型训练速率的常数
- criterion: 损失函数,本质为 torch.nn 对象,对于多分类的模型,我们采用交叉熵函数(即 CrossEntropyLoss )
- optimizer: 模型优化器,本质为 torch.optim 对象,在本次训练中,我们选择 SGD(Stochastic Gradient Descent,即随机梯度下降优化) 作为我们模型的优化方法
1 | from torch import nn, optim |
实现检测
这个函数用于计算我们的模型正确率如何
首先,我们定义了两个变量,分别为 correct —— 存放识别正确的个数、total —— 存放所有的数据个数
每次迭代获取数据时,用模型做预测,将预测结果与真实结果相等的结果存放进 predicts 里
依次对 correct 和 total 更新,最终返回二者比值便是模型正确率
1 | import torch |
Pytorch 实现训练过程
我们将模型的训练过程整合成为一个函数,这个函数接受一个输入: epoches,即训练的批数;它将不断优化模型的参数,不断降低损失函数的值
我们拆分这个训练过程,它主要由这几步构成:
- 每次训练,将训练的图片数据存进 inputs 里,将训练数据对应的标签存进 labels 里
- 通过模型计算得到结果,存进 outputs 里,并通过损失函数得到损失值 loss
- 先清空模型的参数梯度设置,调用 loss 的反向传播重新计算梯度,并依据梯度对模型参数赋值
- 每 1000 次训练,计算这轮计算的时间、损失值、正确率,用作训练时的日志输出,同时将关键数据存入容器中,为后续的可视化做铺垫
- 函数最终返回三个容器,分别存放了特殊训练次数对应的损失值和准确率
1 | from time import perf_counter |
最终 && 可视化操作
我们用 time.perf_counter() 函数来对整个训练过程计时
train() 函数最终返回三个容器,里面存放了训练过程的关键数据,我们可以通过 matplotlib.pyplot 来可视化我们的数据
我们先把这三个容器分别存入 Step、Loss、Acc 中
利用 matplotlib.pyplot 和上述三个容器,我们可视化我们的训练过程
plt.figure() 用来分隔画布,plt.show() 最终展示即可
1 | from time import perf_counter |
完整代码展示
下面是整合了上文内容的完整代码
1 | import torch |
最终,这个模型在训练 5 批次 —— 即 60,000 次训练后的正确率达到了 63%,随着训练次数的增多,准确率也会越来越高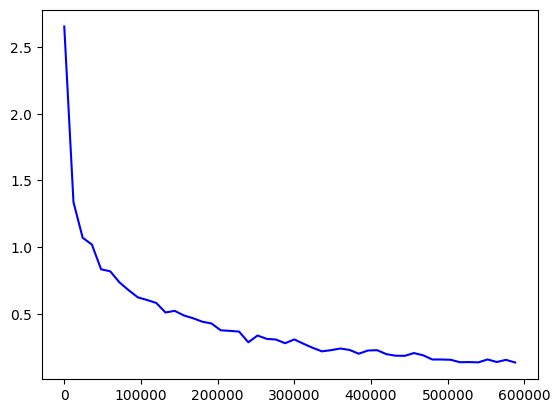
训练损失值的可视化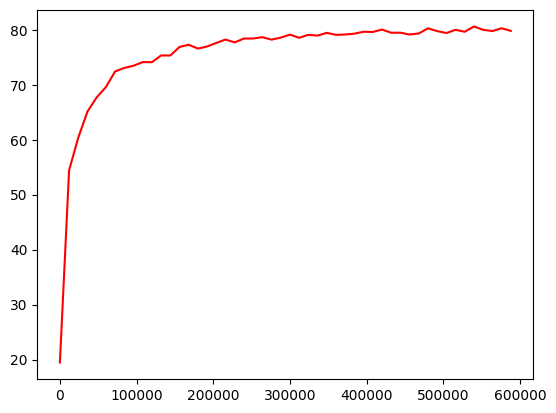
训练正确率的可视化
 wechat
wechat